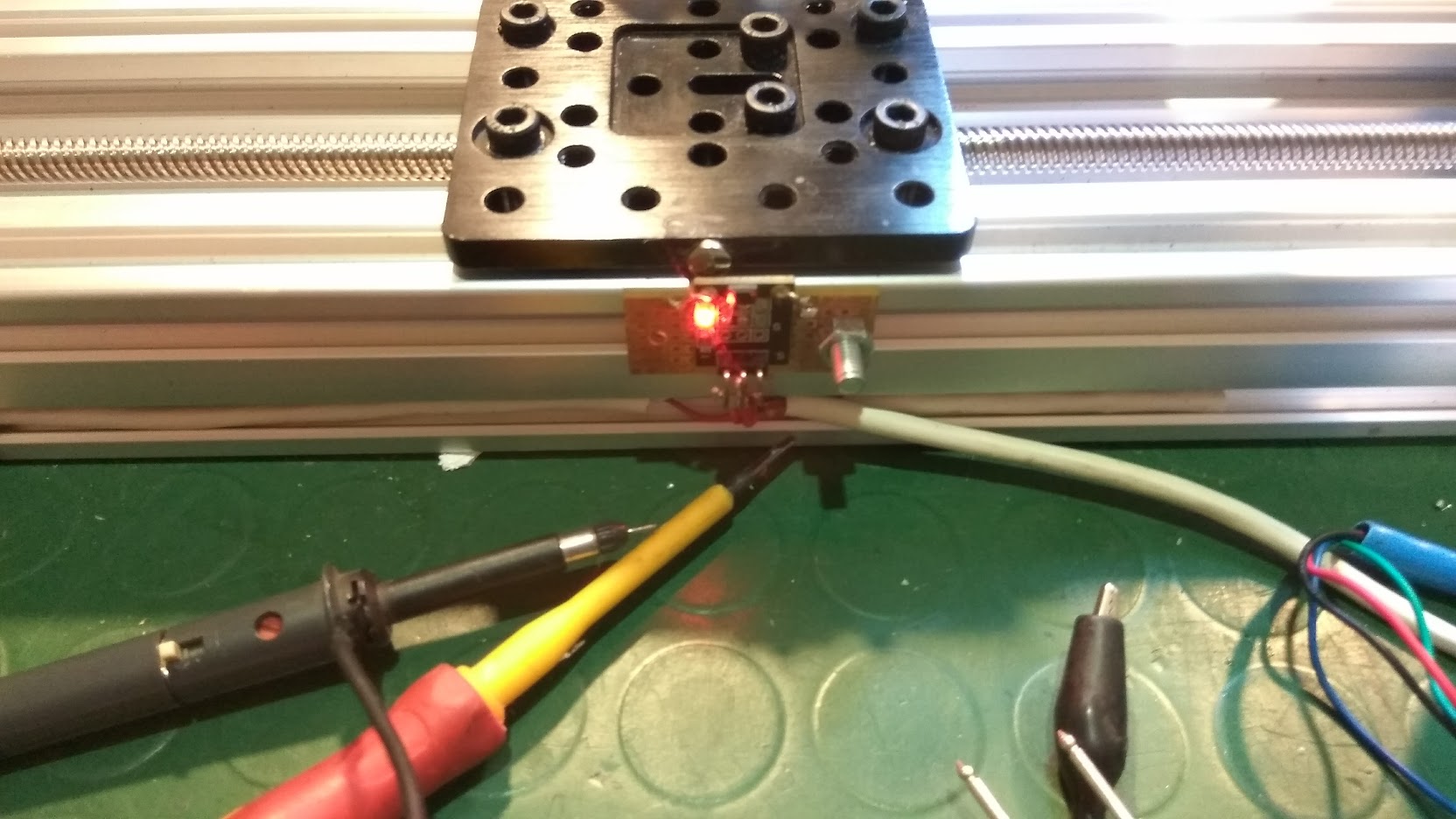
Probao sam ranije primer demo koji je stigao kada sam instalirao ovu speedy biblioteku i video sam da se malo pomeri od prekidaca, mislim da mozda za hall senzor taj pomak nije dovoljan, jer se desi da kada se pomeri da se indikacija (le dioda) na senzoru ugasi kada dodje do njega, ali onda posle sekund ponovo upali, kao da je se ponovo aktivrala logika u hall senzoru. Medjutim tada kad sam probavao, nisam obracao paznju puno na to, jer tad nisam uspeo da zadam da kada uradi homing da ga nateram da pomeri pokretni deo u nekom smeru za bilo koju vrednost, npr 10cm (ili bilo koliko cm).

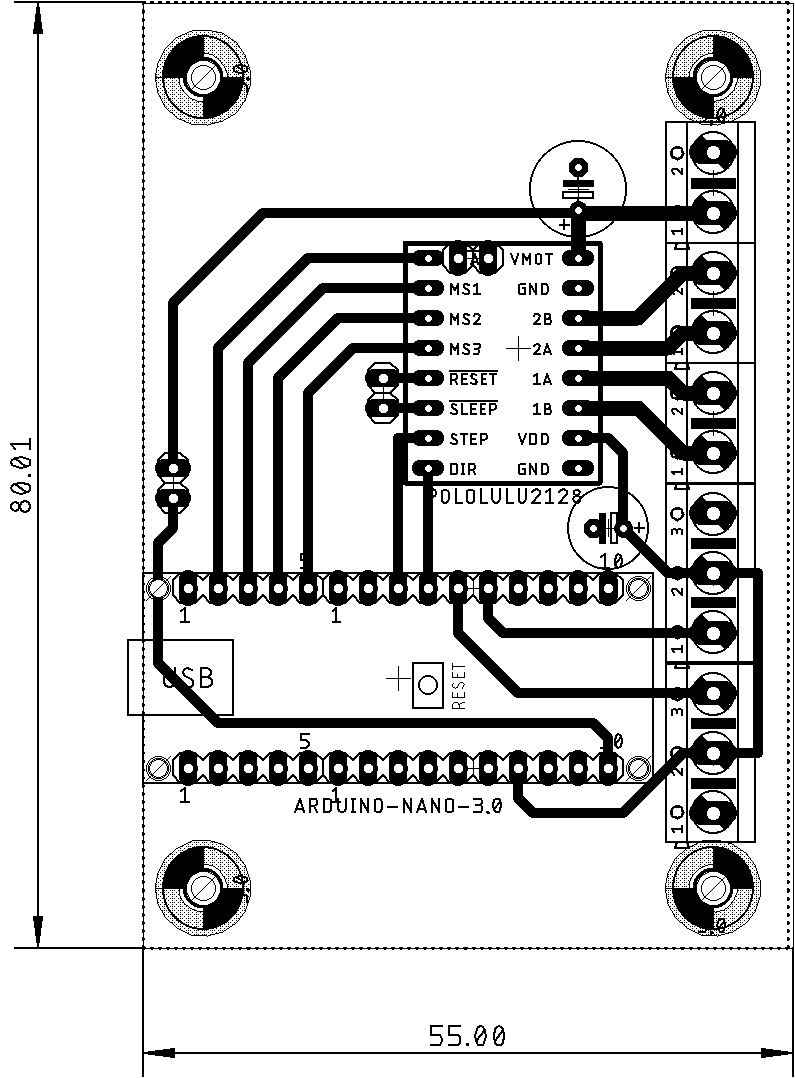
Tu sam eksperimentisao sa komandom stepper.moveToPositionInMillimeters(100); koju sam video u njegovom dokumentu, ali sam onda odustao privremeno da pokusavam jer sam naleteo na ovaj kod koji sam gore okacio sa AccelStepper lib, kako mi je bio proradio sa njim otprilike kako sam ja zeleo, odneo sam sve u radionicu da napravim malo bolju plocicu, a tamo nisam imao komp, niti bih mogao tamo da eksperimetishem sa bilo kojim skecom.
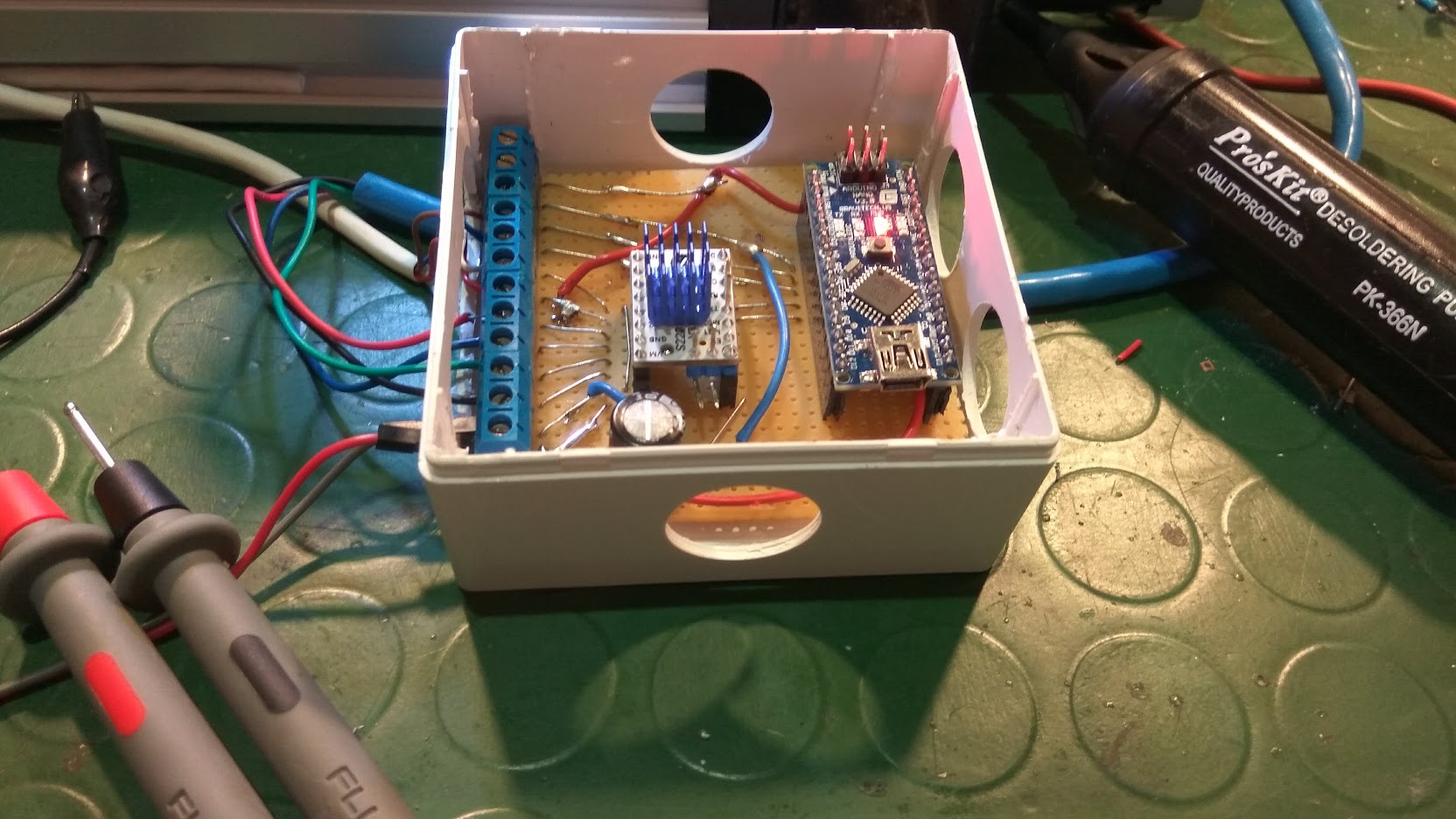
Izgubio sam par dana dok sam napravio, kao sto sam napisao, i onda sam testirao kako se kolica ponasaju kada idu levo desno malo duze, tj gore dole jer mi je to tada bio cilj, buduci da nisam nikad imao u rukama ovakav sklop i nisam znao kako se ponasa u radu. Onda sam primetio onaj problem sa pocetnom pozicijom na limit prekidacu kad dodje struja. Sada sam sklopociju doneo kuci, pa imam mogucnost da je prikacim na komp i da eksperimentishem.




 Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.
Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu. Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.
Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.
 , takodje ne radi. Srecom imam ih jos 3, pa mi tu nije prob. Verovatno je otkazao kada i sam uno. Neki spajk (lee) ih izgleda ubio oboje istovremeno.
, takodje ne radi. Srecom imam ih jos 3, pa mi tu nije prob. Verovatno je otkazao kada i sam uno. Neki spajk (lee) ih izgleda ubio oboje istovremeno.